


ABB机器人维修需检查旋转计数器的位置,通过跟踪噪音找到故障轴承,通过跟踪噪音来确定故障电机的位置,研究机器人TCP的路径,确定哪个轴,从而确定哪个电机可能有故障,检查双杠是否正确,确保按照配置文件中的方式连接了正确的机器人类型,确保机器人刹车正常。电机或变速箱周围区域有漏油的迹象。这可以是在基地,接近配合表面,或在电机的远端在解析器。除了外表肮脏,在某些情况下,如果泄漏的石油量很小,也没有严重的后果。然而,在某些情况下,泄漏的油润滑电机制动器,导致机械手在功率下降时崩溃。

测试电池以及所有电源组件和保险丝,ABB机器人维修检查装置是否有任何松动的连接,修复图表记录器的下一步是为设备供电并将故障排除到组件级别,进行维修并根据需要更换部件,维修提供输入电源,检查输入和输出,还检查控制电路和微控制器,设备设置为出厂默认输入信号,如4-10毫安,热电偶,RTD或压力传感器,后一步 - 验证图表上的输出,以确保它符合制造商的规格,断路器维修流程:通过将设备置于打开位置并检查触点的正确闭合来开始断路器维修。

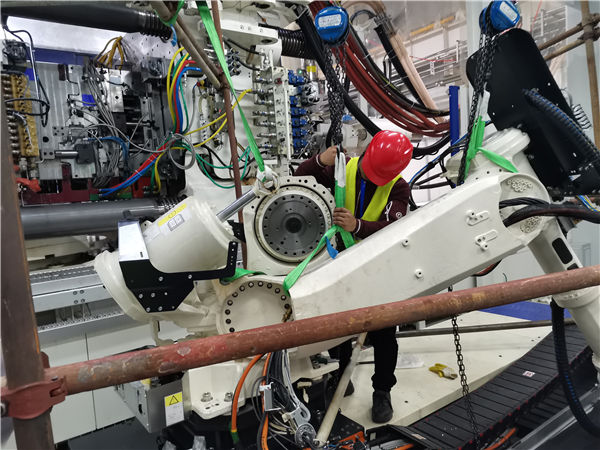
工业机器人常常在在恶劣条件下工作,即使设计时进行完善的设计规范,维护率降低。但是仍然需要定期进行常规检查和预防性维护。这样才可以保证它们在生产线上保持性能和实现一致性。当机器人没有进行定期的预防性保养检查,可能会导致零部件损坏或故障,从而致使生产放慢甚至停机。对机器人的正确保养可能会延长其寿命多年甚至数十年。





 在线客服
在线客服 18842585256
18842585256 871198204@qq.com
871198204@qq.com